

NVIDIA TegraX1 Preview and Architecture Analysis : Automotive: DRIVE CX and DRIVE PX

With NVIDIA’s DRIVE CX, automotive OEMs have a Tegra X1 in a board that provides support for Bluetooth, modems, audio systems, cameras, and other interfaces needed to integrate such an SoC into a car. This makes it possible to drive up to 16.6MP of display resolution, which would be around two 4K displays or eight 1080p displays. However, each DRIVE CX module can only drive three displays. In press photos, it appears that this platform also has a fan which is likely necessary to enable Tegra X1 to run continuously at maximum performance without throttling.

NVIDIA showed off some examples of where DRIVE CX would improve over existing car computing systems in the form of advanced 3D rendering for navigation to better convey information, and 3D instrument clusters which are said to better match cars with premium design. Although the latter is a bit gimmicky, it does seem like DRIVE CX has a strong selling point in the form of providing an in-car computing platform with a large amount of compute while driving down the time and cost spent developing such a platform.
While DRIVE CX seems to be a logical application of a mobile SoC, DRIVE PX puts mobile SoCs in car autopilot applications. To do this, the DRIVE PX platform uses two Tegra X1 SoCs to support up to twelve cameras with aggregate bandwidth of 1300 megapixels per second. This means that it’s possible to have all twelve cameras capturing 1080p video at around 60 FPS or 720p video at 120 FPS. NVIDIA has also made most of the software stack needed for autopilot applications already, so there would be comparatively much less time and cost needed to implement features such as surround vision, auto-valet parking, and advanced driver assistance.

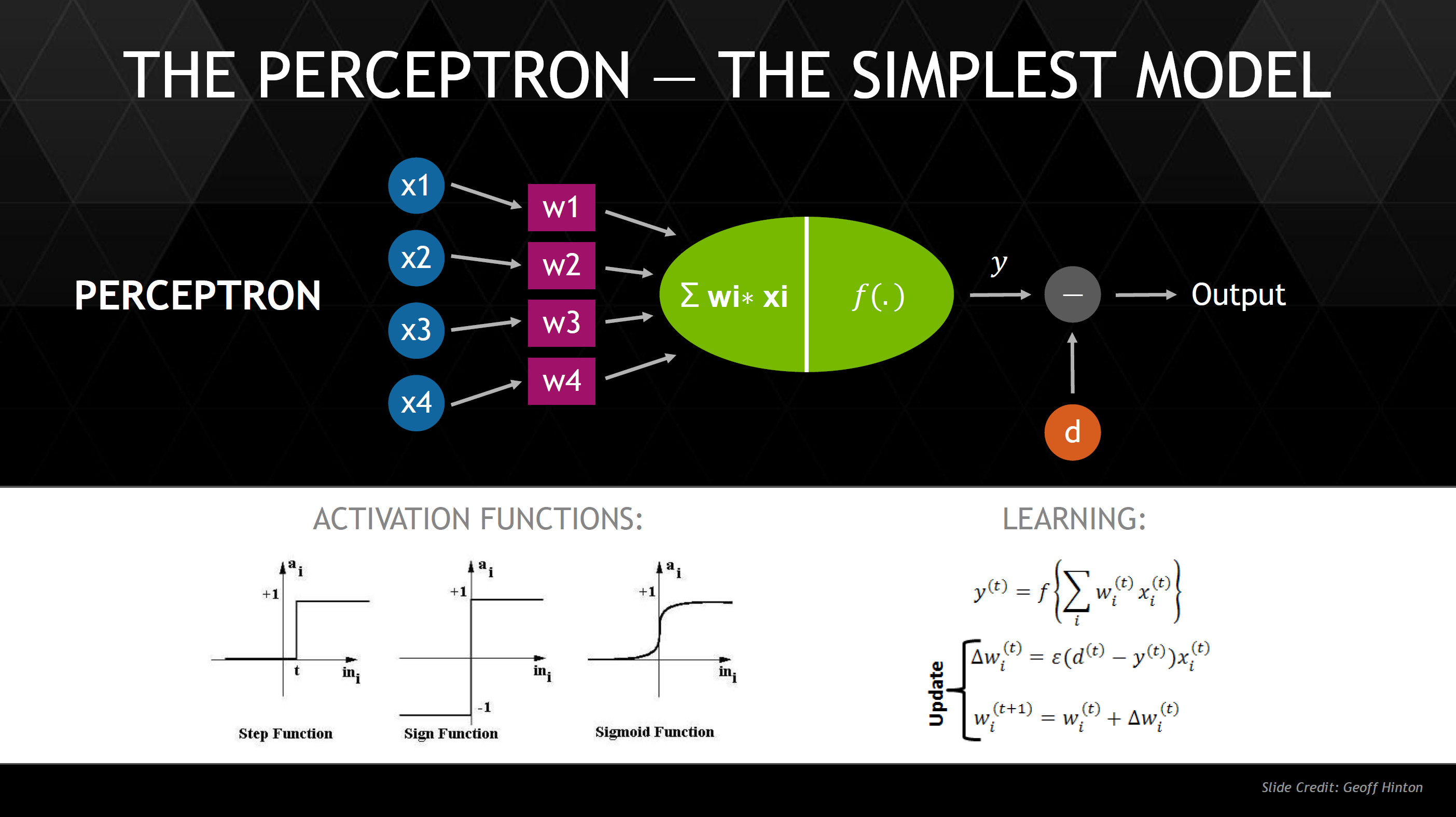
In order to deliver a truly useful driver assistance system, NVIDIA has leveraged neural network technologies which allow for object recognition with extremely high accuracy.While we won’t dive into deep detail on how such neural networks work, in essence a neural network is composed of perceptrons, which are analogous to neurons. These perceptrons receive various inputs, then given certain stimulus levels for each input the perceptron returns a Boolean (true or false). By combining perceptrons to form a network, it becomes possible to teach a neural network to recognize objects in a useful manner. It’s also important to note that such neural networks are easily parallelized, which means that GPU performance can dramatically improve performance of such neural networks.
For example, DRIVE PX would be able to detect if a traffic light is red, whether there is an ambulance with sirens on or off, whether a pedestrian is distracted or aware of traffic, and the content of various road signs. Such neural networks would also be able to detect such objects even if they are occluded by other objects, or if there are differing light conditions or viewpoints.
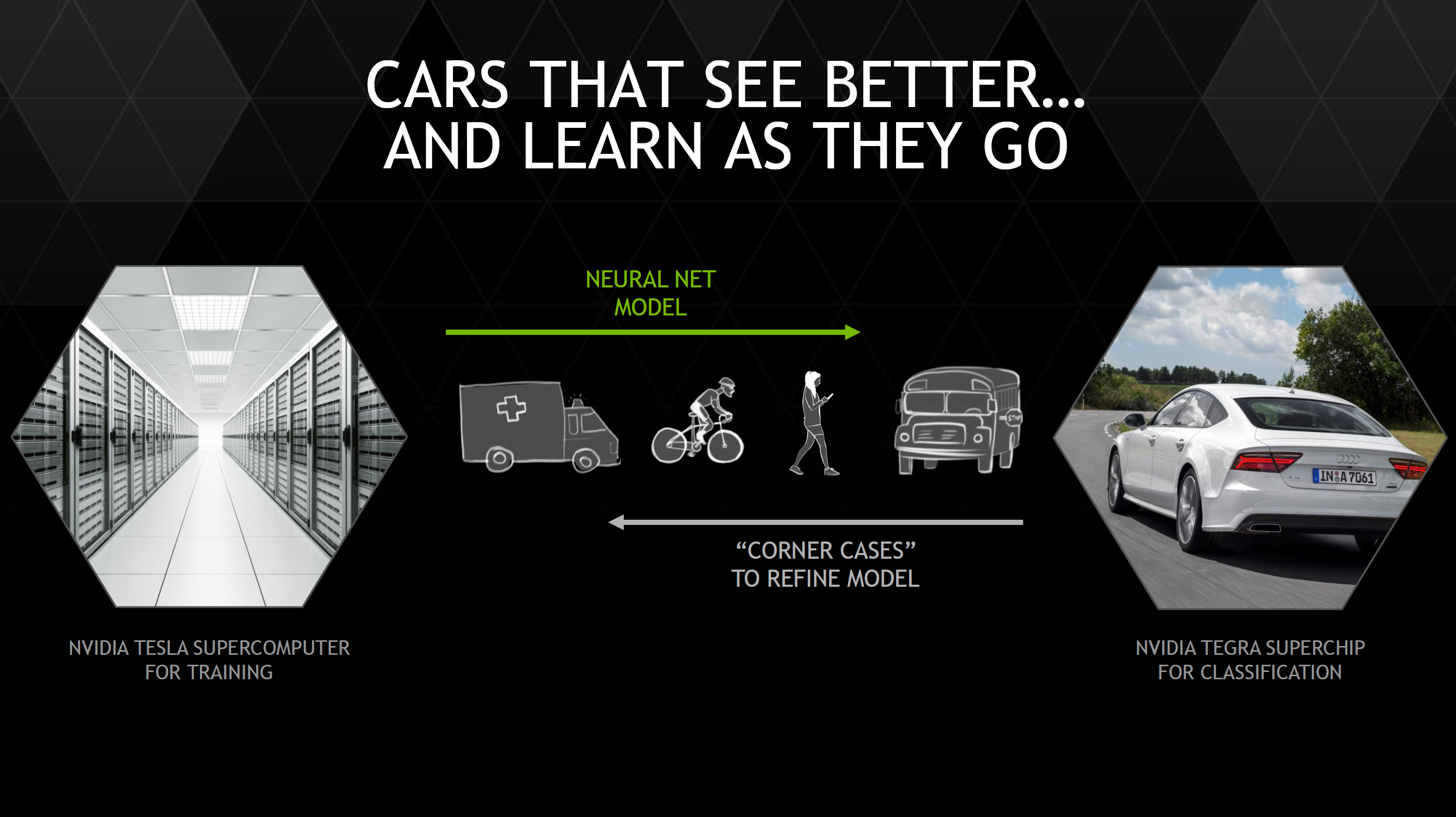
While honing such a system would take millions of test images to reach high accuracy levels, NVIDIA is leveraging Tesla in the cloud for training neural networks that are then loaded into DRIVE PX instead of local training. In addition, failed identifications are logged and uploaded to the cloud in order to further improve the neural network. Both of these updates can be done either over the air or at service time, which should mean that driver assistance will improve with time. It isn’t a far leap to see how such technology could also be leveraged in self-driving cars as well.
Overall, NVIDIA seems to be planning for the DRIVE platforms to be ready next quarter, and production systems to be ready for 2016. This should mean that it's possible for vehicles launching in 2016 to have some sort of DRIVE system present, although it's possible that it would take until 2017 to see this happen.
GPU Performance Benchmarks Final Words
Read more: http://www.anandtech.com/show/8811/nvidia-tegra-x1-preview/4


/http%3A%2F%2Fventurebeat.com%2Fwp-content%2Fuploads%2F2019%2F09%2Fwaymo-ipace-e1572290208222.jpg%3Fresize%3D1200%2C600%26strip%3Dall)
/http%3A%2F%2Fsecurityintelligence.com%2Fwp-content%2Fuploads%2F2020%2F10%2FAutonomous-Car-Security-.jpeg)
/http%3A%2F%2Fportswigger.net%2Fcms%2Fimages%2F8a%2F8b%2Fe0dd-article-201023-machine-learning-ai-concept.jpg)
/https%3A%2F%2Fassets.over-blog.com%2Ft%2Fcedistic%2Fcamera.png)
