

Improving Self-Driving Car Safety And Reliability With V2X Protocols
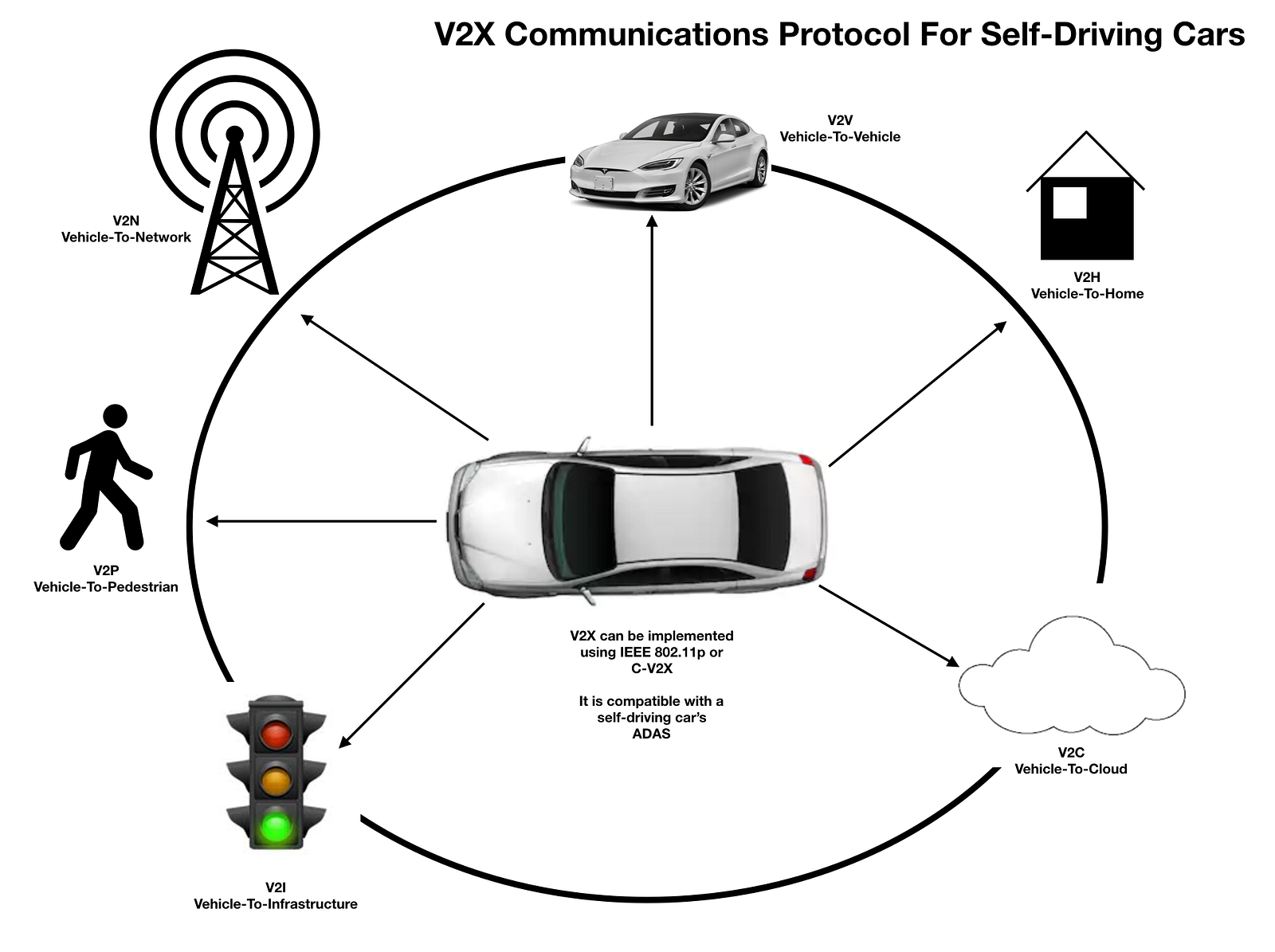
A protocol that would help with self-driving cars is V2X or Vehicle-to-Everything. At the moment AI using machine learning techniques (deep learning) have been the focus of development for autonomous vehicle software. A communications protocol layer for self-driving cars can add further improvements for SAE Level 5 compliance. It is a protocol that supports V2V (Vehicle-to-Vehicle), V2I (Vehicle-to-Infrastructure), V2P (Vehicle-to-Pedestrian), V2H (Vehicle-to-Home), V2N (Vehicle-to-Network) and V2C (Vehicle-to-Cloud) communications. This will allow self-driving cars to communicate and share information among themselves. This will make self-driving cars aware of each other much like how people interact. Another thing this will allow is direct communication with infrastructure like intelligent buildings, smart roads, traffic lights, bridges, railroads, airports and other intelligent transportation systems.
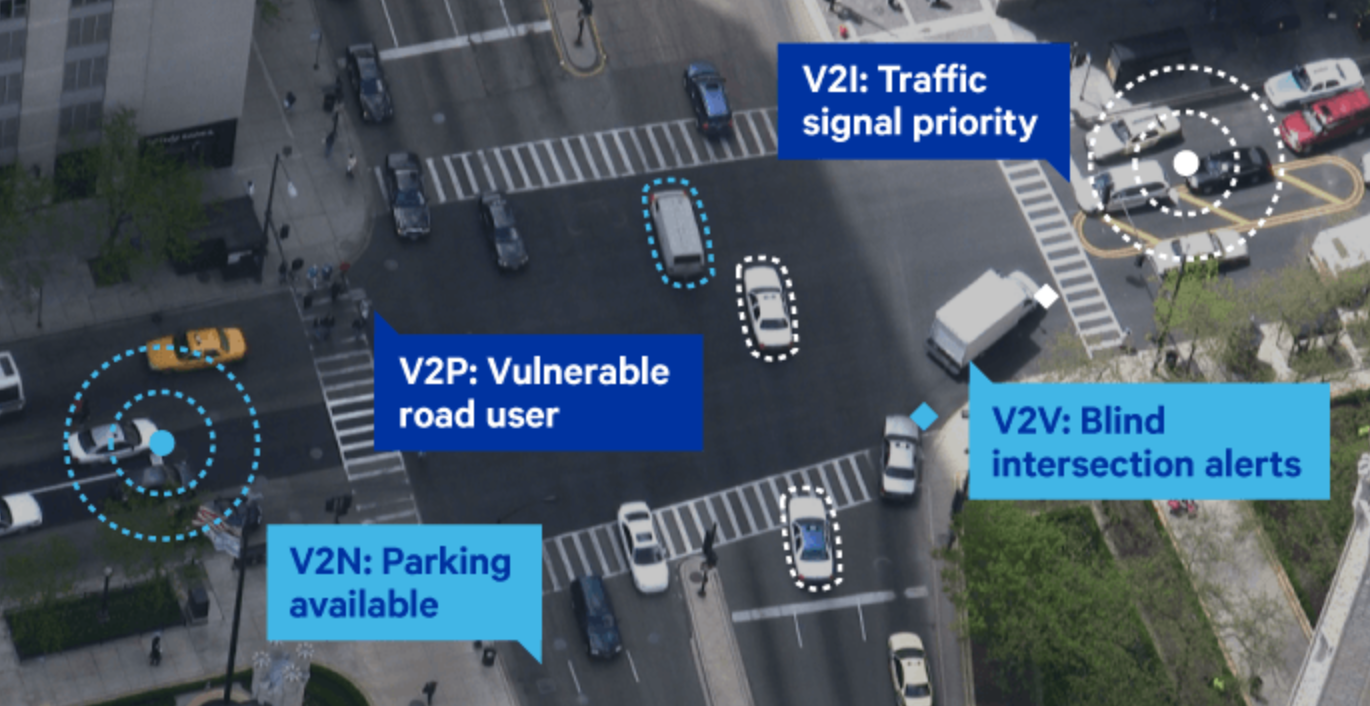
V2V Vehicle-to-Vehicle — Allows V2X enabled self-driving cars to communicate with one another.
V2I Vehicle-to-Infrastructure — Allows self-driving cars to get information from buildings, bridges, roads, traffic lights etc.
V2P Vehicle-to-Pedestrian — Makes use of pedestrian detection systems that can work with a car’s ADAS.
V2H Vehicle-to-Home — Smart homes can send and receive information directly from the car.
V2N Vehicle-to-Network — This is a mobile connection from the car to a carrier’s cellular network.
V2C Vehicle-to-Cloud — Provides direct access to cloud networks using secure TCP/IP connections.
The technology uses short-range wireless signals to communicate using a network that is compliant with their standards. This can address many issues that self-driving car developers face to ensure the safety of operating driverless autonomous vehicles for commercial use, which regulators like the NHTSA require. It has always been a big concern for regulators. Having standards like this will add more to safety and reliability as well. V2X is also meant to be implemented and deployed in a decentralized way without any single authority controlling the cars. Each self-driving car will be its own independent V2X sensor system, so it doesn’t require a central system operator. The sensors built to support V2X are high-bandwidth, low-latency and support high-reliability links. These sensors are also meant to work in inclement weather, providing higher reliability when needed.


/http%3A%2F%2Fventurebeat.com%2Fwp-content%2Fuploads%2F2019%2F09%2Fwaymo-ipace-e1572290208222.jpg%3Fresize%3D1200%2C600%26strip%3Dall)
/http%3A%2F%2Fpbs.twimg.com%2Fmedia%2FEjKBVUUXYAE5MXW%3Fformat%3Djpg%26name%3Dsmall)
/http%3A%2F%2Fpbs.twimg.com%2Fcard_img%2F1303144707619532801%2F3-iTleij%3Fformat%3Djpg%26name%3Dsmall)
/http%3A%2F%2Fwww.autonomousvehicleinternational.com%2Fwp-content%2Fuploads%2F2020%2F08%2FFord-Michigan-Science-Center-1.jpg)
