

VISION-BASED PERCEPTION KIT FOR PROJECTS OF AUTONOMOUS VEHICLE
VISION-BASED PERCEPTION KIT FOR PROJECTS OF AUTONOMOUS VEHICLE
 The “ADAS Groupement” of Mov'eo (imagine mobility) proposes to research laboratories (universities, laboratories), which develop autonomous vehicles demonstrators, a very effective image perception kit: camera, data/signals/images/video acquisition in real time, road detection, obstacle detection, pattern recognition over obstacles.
The “ADAS Groupement” of Mov'eo (imagine mobility) proposes to research laboratories (universities, laboratories), which develop autonomous vehicles demonstrators, a very effective image perception kit: camera, data/signals/images/video acquisition in real time, road detection, obstacle detection, pattern recognition over obstacles.
This kit consists of three parts:
- RT-MAPS software to acquire data, signals, video, all time stamped. RT-MAPS allows you to replay data, signals, images, synchronized and can integrate processing modules.

link : http://www.intempora.com/
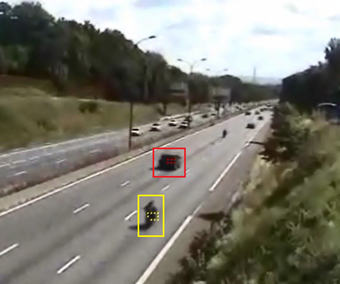
- both RoadNex (which detects the road ahead of a vehicle from a camera), and ObstaNex (which detects obstacles in front of the vehicle from a camera and an inertial measurement unit) modules. NB: a camera may be provided with both modules.

link : http://nexyad.net/Automotive-Transportation/?page_id=412

link : http://nexyad.net/Automotive-Transportation/?page_id=429
- Neuro-RBF module: neural network based system to develop oneself pattern recognition applications on the obstacles detected by ObstaNex (eg recognition of signs, pedestrian, etc ...). This system will be integrated in a neural processor, in the future.

link : http://globalsensing.eu/category/sections/technology
All modules are available as executable components into RT-MAPS.
These four modules (RT-MAPS, RoadNex, ObstaNex, et Neuro-RBF) already have solid references in French universities.
Contact: groupements@pole-moveo.org
Keywords: autonomous vehicle, perception kit, camera, rt-maps, image acquisition, time stamp, real time, RoadNex, road detection, ObstaNex, obstacle detection, Neuro-RBF, neural networks, pattern recognition, pedestrians, signs, intempora, nexyad, global sensing technologies, adas, groupement adas, mov’eo, moveo


/http%3A%2F%2Fventurebeat.com%2Fwp-content%2Fuploads%2F2019%2F09%2Fwaymo-ipace-e1572290208222.jpg%3Fresize%3D1200%2C600%26strip%3Dall)
/http%3A%2F%2Fsecurityintelligence.com%2Fwp-content%2Fuploads%2F2020%2F10%2FAutonomous-Car-Security-.jpeg)
/http%3A%2F%2Fportswigger.net%2Fcms%2Fimages%2F8a%2F8b%2Fe0dd-article-201023-machine-learning-ai-concept.jpg)
/https%3A%2F%2Fassets.over-blog.com%2Ft%2Fcedistic%2Fcamera.png)
